

مقدمه
پست های گذشته راجب موتور های AC و موتور های DC صحبت کردیم، حال میخواهیم درباره موتورهای خاص الکتریکی صحبت کنیم.
موتور های خاص
موتورهای پله ای (stepper motor)
موتورهای پله ای یکی از موتورهای با دقت بالا جهت کاربردهای الکترونیکی و صنعتی می باشد. این موتور امکان گردش در زاویه های محدود را فراهم می آورد و صرفا توسط برد الکترونیکی کنترل می شود، در واقع امکان به کارگیری این موتور بدون یک کنترل کننده الکتریکی امکان پذیر نیست.
موتورهای معمولی با دریافت جریان برق با سرعت ثابت یا متغیر در جهت راست گرد یا چپ گرد به چرخش در می آیند.
حال فرض کنید به موتوری نیاز داریم که لازم باشد به صورت کاملا دقیق بچرخد. یعنی مثلا اگر به آن دستور دهیم که ۱۲ درجه در جهت ساعتگرد بچرخد، دقیقا به همان اندازه گردش کند نه بیشتر و کمتر. این وظیفه ایست که موتور پله ای برای ما انجام می دهد. برای درک بیشتر این نیاز به شکل زیر نگاه کنید.
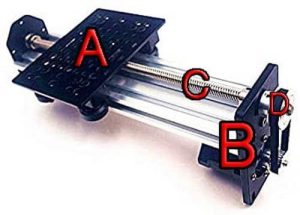
همانطور که در شکل بالا مشاهده می کنید:
الف) میز A روی میز B حرکت می کند، این کار از طریق چرخش پیچ C امکان پذیر می شود.
ب) پیچ C به پولی D متصل است؛ یعنی اگر پولی D را بچرخانیم میز A حرکت می کند.
ت) اگر پولی D با موتور الکتریکی ساده به گردش دربیاید، امکان تنظیم دقیق حرکت میز A نسبت به B فراهم نمی شود.
طرز کار موتور های پله ای
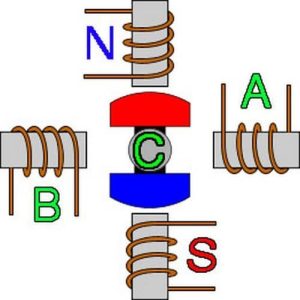
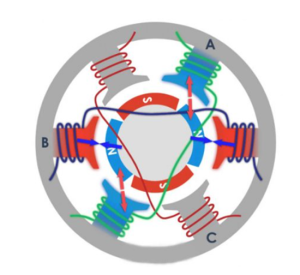
موتورهای پله ای از تعداد بیشتری قطب یا سیم پیچ مستقل در استاتور (و گاهی اوقات روتور) بهره می برند. سیم پیچ های استاتور بصورت مرحله ای مگنت شده و امکان چرخش با زاویه مشخص را برای روتور فراهم می کنند. در شکل زیر، محور روتور با C نشان داده شده، در این حالت قطب های بالا و پایین استاتور مگنت شده اند و باعث جذب قطب های آهنربایی روتور می شوند. (قطب های آهنربا شده روتور با رنگ آبی و قرمز نشان داده شده اند). اکنون اگر قطب های A و B مگنت شوند، قطب های قرمز و آبی روتور به سمت قطب های A و B جذب می شوند و باعث می شود که روتور ۹۰ درجه بچرخد. بنابراین همان طور که در شکل می بینید روتور در جهت نشان داده شده قرار می گیرد.
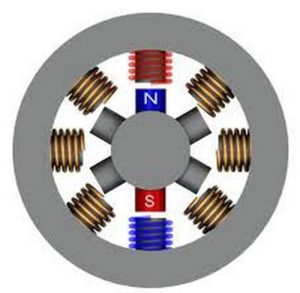
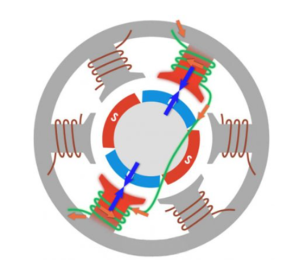
همان طور که می بینید با تنظیم مگنت شدن یا نشدن قطب های استاتور، امکان چرخش دقیق روتور فراهم می شود. برای چرخش دقیق تر روتور می توان از تعداد بیشتر قطب های آهنربایی (یا همان سیم پیچ ها) در استاتور و روتور استفاده کرد. مثلا در شکل زیر از سه قطب در روتور و ۸ قطب در استاتور برای افزایش دقت چرخش موتور پله ای استفاده شده است.
مزایای استفاده از استپ موتور ها:
- کنترل دیجیتالی ساده
- توقف ناگهانی بدون آسیب
- بدون جاروبک
- ساختمان مکانیکی ساده
- راه اندازی ساده ارزان
- فاقد خطای تجمعی
- بدون نیاز به فیدبک پایدار
معایب استپ موتور ها:
- توان خروجی محدود
- دوران با پله ثابت
- پرش و نوسان زیاد
- راندمان کم
- قادر به تغذیه بار با انرژی زیاد نیستند
کاربرد (استپ موتور)
هر چند کاربرد استپر موتورها امروزه بسیار گسترده است، اما استپ موتورها را میتوان در وسایلی مانند سی ان سی ها، پرینترهای سه بعدی، پرینترهای جوهرافشان، اسکنرها، پلاترها، فلاپی درایورها، دی وی دی درایورها و لنز بعضی از دوربینهای دیجیتال یافت البته این موارد گوشهای از کاربرد استپ موتورمی باشد.
به طور کلی برای سیستمهایی که نیاز است موقعیت دقیق (افقی، عمودی) یا زاویه دقیق را تعیین کنیم میتوانیم از استپ موتورها استفاده کنیم. استپ موتور هادر ساخت ماشینهای عددی مانند ماشینهای سی ان سی، در صنعت استفادههای فراوانی دارد.
همچنین استپر موتور ها در صنایع رباتیک نیز کاربرد وسیعی برای ساخت بازوها و سایر اجزای دقیق ربات را به خود اختصاص دادهاند. استپر موتور در صنایع خودروسازی نیز کاربرد دارد یکی از موارد کاربرد انها در خودروها، کنترل میزان دور موتور، افزایش دور موتور هنگام استفاده از کولر، جلوگیری از کاهش ناگهانی دور موتور و در کل ایجاد تعادل و کنترل دور موتور میباشد.

موتور های براشلس (DC بدون جاروبک)
یکی از انواع موتورها، موتور براشلس است که نام دیگر آن موتور جریان مستقیم بدون جاروبک می باشد. در موتور براش جهت انتقال جریان به روتور از بخشی به نام جاروبک استفاده می شود و با چرخش روتور قطب ها جابه جا شده و موتور به حرکت در می آید. در طی این جابه جایی از طول عمر موتور کاسته می شود و نقش موتورهای براشلس پر رنگ تر می شود.
در موتورهای براشلس به جهت عدم تماس مکانیکی، حداقل گرما تولید می شود و نرخ سایش قطعات پایین می آید و فرآیند انتقال انرژی و بهره وری الکتریکی بهبود می یابد و در نتیجه باعث بهبود عملکرد موتور و قدرت آن می شود. بازدهی بیشتر موتورهای براشلس طول عمر باتری را تا ۵۰ درصد افزایش می دهد. از آنجایی که در موتور براشلس اصطکاک و جرقه ای ایجاد نمی شود، صدای کمتری نیز تولید می شود.
ویژگی ها و مزایای موتور براشلس
با توجه به این که موتور براشلس فاقد جاروبک است و ساختار خاصی دارد، مزیت های زیادی را به همراه دارد. عدم وجود جاروبک یا براش در موتور براشلس باعث به حداقل رسیدن اصطکاک در طول عملیات، کاهش فرآیند تولید حرارت و در نهایت طول عمر بیشتر می شود. از دیگر مزیت های مهم موتور براشلس راندمان بالای آن است. موتور معمولی با جریان مستقیم تنها در نقاط خاصی در گردش خود می تواند به حداکثر گشتاور برسد، اما موتور براشلس به طور متداوم و پیوسته در حالت ماکزیمم گشتاور کار می کند.
دیگر مزیتی که می توان به آن اشاره کرد، قابلیت کنترل این موتور با دقت بالا است. استفاده از مکانیزم فیدبک جهت رسیدن به گشتاور و سرعت مطلوب باعث شده تا کنترل پذیری به راحتی انجام شود.
عدم داشتن جاروبک در این نوع موتور باعث افزایش طول عمر موتور شده و از ایجاد نویز جلوگیری می کند. این در حالی است که در موتورهای معمولی هنگام عبور تیغه های کموتاتور از جاروبک ها جرقه شدید ایجاد می شود که این جرقه ها نویزهای الکتریکی را به همراه دارد. در توان برابر موتورهای براشلس نسبت به موتورهای معمولی وزن کمتری دارند.
ساختار موتور های براشلس
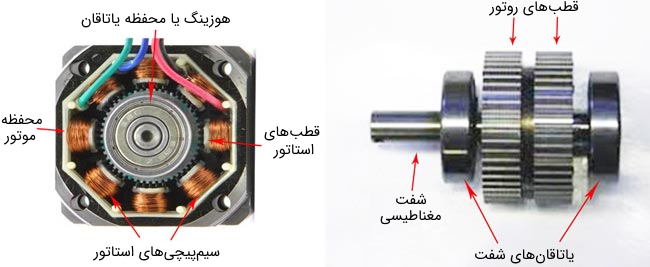
استاتور: هر سیم پیچ از تعداد بیشماری حلقه تشکیل شده که به شکل متوالی و با آرایشی خاص به همدیگر متصل شده اند. هر سیم پیچ در درون استاتور به شکلی توزیع شده تا بتواند یک قطب را تشکیل بدهد. استاتور موتور براشلس ساخته شده از ورقه های فولادی سیلیکونی با ضخامت مشخص می باشد که با اتصال به یکدیگر تشکیل یک پشته را می دهند.
روتور: در روتور، موتور براشلس به جای سیم پیچی از آهنرباهای دائمی استفاده شده که این کار باعث حذف تلفات سیم پیچی روتور می شود و راندمان موتور بهبود می یابد. با توجه به نحوه قرارگیری آهنرباها در روتور و جهت شار مغناطیسی، ساختارهای متفاوتی در موتورهای براشلس به وجود می آید. موتورهای براشلس شامل دو نوع هستند که عبارتند از: براشلس Inrunner و براشلس Outrunner.
استاتور: بخش ثابت و بدون حرکت موتور است که آرمیچر درون آن قرار می گیرد.
سیمپیچها: سیم پیچ ها باعث به وجود آمدن میدان مغناطیسی می شوند.
اتصالات: انرژی مورد نیاز را از طریق کنترلر به سیمپیچها میرسانند.
یاتاقانها: باعث می شوند که اصطکاک به حداقل و یا صفر برسد که در نتیجه باعث بالا رفتن گشتاور می شود.
آهنرباها: آهن ربا میدان مغناطیسی را برای جذب و دفع سیم پیچ ها مهیا می کند.
محور: پس از تبدیل انرژی الکتریکی به مکانیکی ،محور ها انرژی مکانیکی برای کارکرد موتور را انتقال می دهند.

نحوه عملکرد موتور براشلس
موتور های براشلس از لحاظ کارکرد مانند موتورهای دیگر کار می کنند با این تفاوت که سرعت و گشتاور بیشتری دارند و تفاوت در ساختار آنها به این گونه است که ذغال حذف شده و آهن ربا جایگزین شده است که در نهایت منجر به تفاوت در نحوه عملکرد آنها شده است.
کاربرد موتور های براشلس
از موتورهای براشلس در لوازم و محصولاتی چون ماشین لباسشویی، جاروبرقی، تهویه هوا، کوادکوپترها و … استفاده می شود. کوادکوپتر نوعی مولتی روتور می باشد که توسط چهار موتور نیروی لیفت ایجاد می کند و می تواند در آسمان شناور باقی بماند.
با توجه به این که این نوع موتور برای کنترل نیرو بسیار ایده آل و مناسب است، در آینده شاهد کاربرد بیشتری از آن در محصولات مختلف خواهیم بود. به عنوان مثال در برخی موارد که از موتورهای پله ای در محصولات استفاده می شود، موتورهای براشلس می تواند جایگزین مناسبی برای آن باشد.
موتور براشلس انواع مختلفی دارد و به دلیل کارایی و راندمان مطلوب در بسیاری از صنایع کاربرد دارد. کاربرد موتورهای براشلس به طور گسترده در لوازم خانگی، خودرو، هوافضا، پزشکی، تجهیزات و ماشین آلات صنعتی خودکار و… می باشد.
مطالب مرتبط

ارایه تخصصی صحیح
2022-11-14
بدون دیدگاه
ارایه تخصصی صحیح
2022-10-27
بدون دیدگاه
جهت ثبت هرگونه درخواست مرتبط با سایت، میتوانید فرم زیر را پر کنید. کارشناسان ما در اولین فرصت با شما تماس خواهند گرفت.